نقشه برداری دقیقتر از زیر آب ممکن شد
اقیانوسها شامل یک قلمرو به ظاهر بی پایان هستند که هنوز کشف نشده است و نقشه برداری از این آب های ناشناخته در سطح جهانی یک کار دلهره آور و به شدت سخت است. ناوگانی از رباتهای زیر آب میتوانند ابزار ارزشمندی برای کمک به نقشهبرداری باشند، اما این رباتها باید بتوانند در مناطق تاریک و ناشناخته و به با شکلی نامنظم حرکت کنند و در عین حال کارآمد و دقیق باشند.
در مطالعهای که اخیرا در مجله مهندسی اقیانوسی IEEE (انجمن مهندسان برق و الکترونیک) منتشر شد، یک تیم تحقیقاتی چارچوب جدیدی را توسعه دادهاند که به رباتهای خودگردان اجازه میدهد تا این مناطق را به را با کارایی بالا و نرخ خطای پایین نقشهبرداری کنند.
چالش اصلی در نقشه برداری از محیط های زیر آب، عدم قطعیت در موقعیت ربات است. به نوعی چالش بسیار بزرگ این است که متوجه شویم ربات دقیقا کجا قرار گرفته و چه میزان از میسر را پیموده است.
از آنجایی که GPS در زیر آب در دسترس نیست، بیشتر رباتها در زیر آب مرجع تشخیص موقعیت ندارند و دقت در راهحلهای ناوبری آنها متفاوت است. اما تحقیقی جدید با کمک الگوریتم خاصی که برای آن توسعه یافته است به رباتی خودمختار کمک کرد تا نقشهای بسیار دقیق از زیر آب تهیه نماید.
مدل ایجاد شده جدید از یک نقشه مجازی ایجاد میکند که به طور تقریبی منطقه اطراف را نشان میدهد. آنها الگوریتمی را توسعه دادند که مسیری را بر روی این نقشه مجازی به گونهای طراحی میکند که عدم قطعیت و مشاهدات ادراکی ربات را در نظر میگیرد و موجب خلق نقشهای دو بعدی و دقیق میشود.
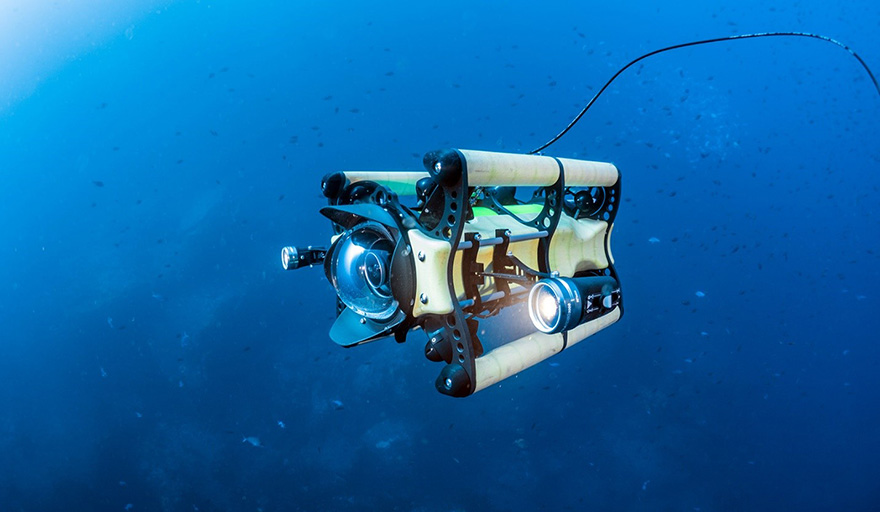
مشاهدات ربات در زیر آب با استفاده از تصویربرداری با امواج سونار گردآوری میشوند که به شناسایی اشیاء موجود در محیط مقابل ربات در محدوده 30 متری و میدان دید 120 درجه کمک میکنند. آنها تصاویر را پردازش میکنند تا از هر تصویر سونار یک ناحیه یا منطقه زیر آب را مشخص نمایند.
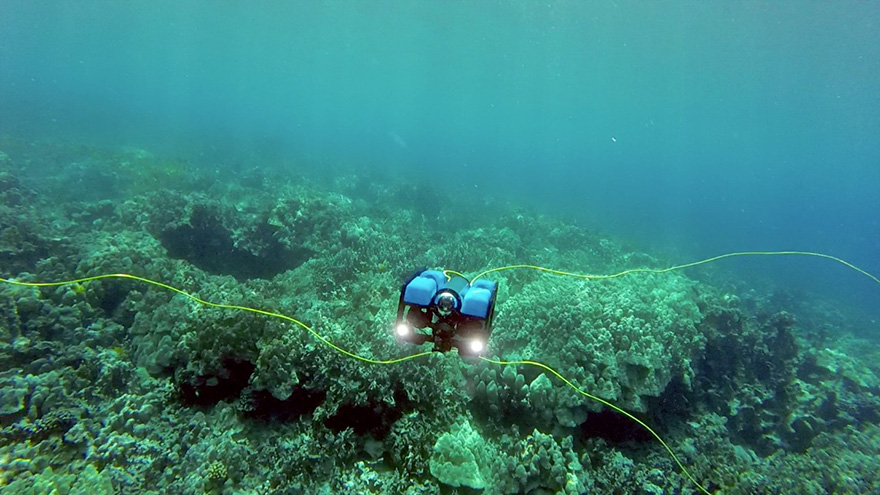
این تیم تحقیقاتی رویکرد خود را با استفاده از یک ربات زیرآبی با نام BlueROV2 در بندری در ناحیهای به نام Kings Point مورد آزمایش قرار دادند، منطقه ای که به گفته محققان به اندازه کافی بزرگ است که اجازه ایجاد خطاهای ناوبری قابل توجه را دهد، اما به اندازه کافی کوچک است که آزمایشهای تجربی متعددی را بدون مشکل زیاد میسر گرداند. این تیم مدل خود را با چندین مدل موجود دیگر مقایسه کرد و هر مدل را در حداقل سه آزمایش 30 دقیقهای آزمایش کرد که در آن ربات در بندر حرکت میکرد.
نتایج نشان داد که هر یک از مدلهای قبلی در نقشه برداری زیر آب دارای مزایای منحصربهفرد خود هستند، اما مدل جدید نتایج بسیار جذابی را بین کاوش سریع محیطهای ناشناخته در حین ساختن نقشههای دقیق از آن محیطها به طور همزمان ارائه مینماید.
آنها پیش بینی میکنند که این مدل برای مجموعه گستردهتری از کاربردها، مانند بازرسی توربین های دریایی، زیرساختهای آبزی پروری دریایی (از جمله مزارع ماهی) و زیرساخت های عمرانی مانند اسکله ها و پل ها مفید باشد.
محققان در تلاش هستند تا این تکنیک را به سناریوهای نقشهبرداری سهبعدی و همچنین موقعیتهایی که ممکن است قبلاً یک نقشه جزئی از منطقهای وجود داشته باشد، گسترش دهند، این تیم میخواهد که رباتها از آن نقشه استفاده مؤثری کنند، نه اینکه محبور باشند یک محیط را به طور کامل از ابتدا کاوش کنند. محققان میگویند اگر بتوانند چارچوب خود را با موفقیت گسترش دهند تا در سناریوهای نقشه برداری سه بعدی از زیر آب موفق شوند، ممکن است بتوانند از آن برای کشف شبکه های غارهای زیر آب یا کشتی های غرق شده نیز استفاده کنند.
لمس کف اقیانوس، ربات غواصی که حس را منتقل میکند!
اخیرا نوآوری دیگری نیز دنیای اکتشافهای دریایی را تحت تاثیر قرار داده است. ربات غواص جدیدی ساخته شده است که تستهای آن در دریای مدیترانه بسیار موفق و به نوعی شگفت انگیز بوده است. OceanOneK دارای یک نیمه بالایی انسان نما و یک نیمه پشتی باریکتر با هشت پیشران چند جهته است که امکان مانور دقیق در زیر آب را فراهم میکند. سیستم بازخورد لمسی و دید استریوسکوپی ربات، احساسات بسیار واقع بینانهای را ایجاد میکند به طوری که انگار اپراتور ربات خودش همراه ربات در زیر آب است. اپراتور ربات با نگاه کردن به کمک چشمان ربات به کشتی تاریخی که در زیر آب غرق شده بود و حس کردن از طریق دستان ربات به واسطه دارا بودن سیستم لامسهای در انگشتان ربات توانست مقاومت آب را حس کند و می توانست اشکال و فاصله آثار تاریخی اطراف خود را تشخیص دهد.
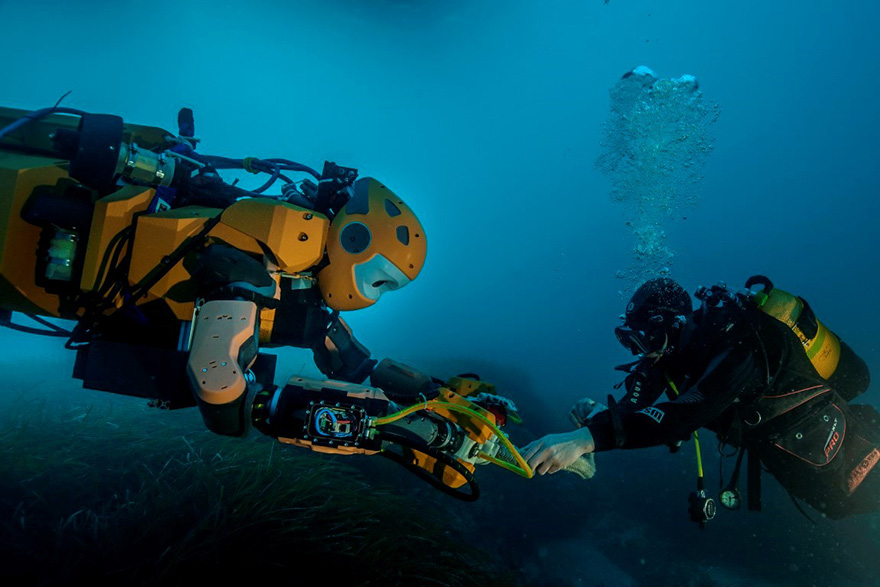
ماموریت OceanOneK در عمق 500 متری دو هدف داشت: کاوش در مکانهایی که هیچکس قبلاً نرفته است و نشان دادن اینکه میتوان حس لامسه، دیدن و تعامل انسان و ربات را به این عمق رساند. از نظر من این اتفاق بسیار مهمی است که از لحاظ فنی ممکن شده است و نوید کشف و تجربههای فوق العادهای را در آینده میدهد.
به گفته دانشمند برجسته رباتیک دکترخطیب که کار با این ربات را تجربه کرده است: این اولین بار است که یک ربات قادر است به چنین عمقی (این ربات تا حدود 1000 متر در این تست به جستجو ادامه داد) برود، با محیط تعامل داشته باشد و به اپراتور انسانی اجازه دهد آن محیط را احساس کنند، این سفر باورنکردنی بوده است. OceanOneK به عنوان یک نشان یادبود، پلاکی را روی بستر دریا گذاشت که روی آن نوشته شده بود:
"اولین لمس یک ربات از کف دریا"
ساخت این ربات با ساعتهای بیشماری طراحی، آزمایش و مونتاژ با اعضای تیم همکار در آزمایشگاه، دهها سفر به استخر دانشگاه استنفورد برای اشکالزدایی، و درسهای بیشماری که باید قبل از مواجهه با غیرقابل پیشبینی بودن دنیای واقعی آموخت، آغاز شد.
پروژه OceanOne نه تنها شامل نوآوری های پیشرفته در لمس، رباتیک زیر آب، و تعامل انسان و ربات است، بلکه فرصت های جدیدی برای علوم دریایی و فعالیت های مهندسی زیر آب، مانند بازرسی و تعمیر قایق ها و زیرساخت ها از جمله پایه های پل و خطوط لوله زیر آب است.
سفرهای دیگر در مناطق مختلف در سراسر جهان، از جمله شهرهای گمشده مدفون در دریاچههای عمیق، صخرههای مرجانی، و خرابههای مهم باستانشناسی در اعماق بسیار دور از دسترس انسان برنامهریزی شدهاند که OceanOneK فرصتی منحصر به فرد برای درک و کشف گذشته فراهم میکند.
خطیب میگوید: «فاصلهگذاری فیزیکی انسانها از فضاهای خطرناک و غیرقابل دسترس در حالی که مهارتها، شهود و تجربهشان را به کار مرتبط میسازد، نوید تغییر اساسی در کار و کاوش از راه دور را میدهد.» سیستمهای رباتیک مواد مختلف را جستجو کرده و اطلاعات مهمی را به دست خواهند آورد، زیرساخت ایجاد میکنند و عملیات پیشگیری و بازیابی را در زمان بلایای طبیعی انجام میدهند چه در اعماق اقیانوسها و معادن، چه در بالای کوهها یا حتی در فضا.»